
���ͺ����еط����վ֙C�P���O�ܿ���11�����O���ҡ��C�P�hί���C�P�oί������Ϣ���ĺ͇��H�����о����h�F�C�����o�z�O�첿�T���I��λ������F�w��1����ͬ�r�O���ɳ��C��12�����քe�飺ֱ�����չ���һ�־֡�ֱ�����չ������־֡�ֱ�����չ������־֡�ֱ�����չ����ķ־֡��������չ����־֡������ո������@�^�־֡����خa�������չ����־֡��籣�־֡�����֡��������g�_�l�^�ط����վ֡����⽛���_�l�^�־֡�������g�_�l�^�ط����վ֣�ֱ�ٙC��9�����քe�飺�³Dž^�ط����վ֡�����^�ط����վ֡���Ȫ�^�ط����վ֡�ِ���^�ط����վ֡���Ĭ������ط����վ֡��п��пh�ط����վ֡��ָh�ط����վ֡���ˮ�ӿh�ط����վ֡��䴨�h�ط����վ֡����У��ɳ��C����̎����λ2�������Ƽ���λ10����ֱ�ٙC���քe��9����h���^���O�ض��֣��������Ƽ�Ҏ��

�S������Ƽ��IJ���lչ������ȡ�ø��õĕ��hЧ����һ��ĕ��hԒͲ��һЩ�����ѽ���̫�m�ã��D�����F�����͵ĕ��hϵ�y���@�������������ʽ�o��U���hϵ�y������hϵ�y�������M�����hʰ�����Ԅ����桢�o�ړ����߷����ԡ������ɔ_�������dz��m���F�����ܕ��h���������ʽ���hϵ�y�nj�17ֻ������ȫ����ʰ���^���Y�ϔ��������L��м��g�����l��푑��и����r���в����γ��c���g�V������µđ��ã����������յ��Z����̖��Դ�ķ����Լ���׃�����@Щ�����������ɘO���ˈD�Բ�����ʽ���@ʾ�Z����̖�ď����c�Ƕȡ����Ô����·����оƬ���߂�150��ʰ���Ƕȣ��oՓ������߀��վ�˾��ܱ��C���|Ч����


��Е��hϵ�y����ԭ��
���ʽ���hϵ�y��һ�Mλ�ڿ��g��ͬλ�õ�ȫ�������L��һ�����Π�Ҏ�t�����γɵ���У��nj����g��������̖�M�п��g�ɘӵ�һ�N�b�ã��ɼ�������̖����������gλ����Ϣ������Դ�������L���֮�g���x���h�����Ɍ���з֞����ģ�ͺ��h��ģ�͡�������������L���ؓ�Y�����t�ɷ֞龀����С�ƽ����С��w��еȡ�
һ�����h��ģ��
���ǿv������ý�|���|�c���������\�ӵIJ�������һ�N��Ӳ���Դ�l��Ӻ�Դ���ܵ�ý�|������ӣ����S��ý�|�����ܔUɢ�����������沨��
����Դ�������L��о��x���h�����Ɍ���ģ�ͷ֞�ɷN������ģ�ͺ��h��ģ�͡�����ģ�͌����������沨�������]�����L�Ԫ������̖�g�ķ��Ȳ�h��ģ�̈́t��������ƽ�沨�������Ը��Ԫ������̖�g�ķ��Ȳ�����J���������̖֮�g�Ǻ��εĕr���Pϵ���@Ȼ�h��ģ���nj����Hģ�͵ĺ������O��غ�����̎���y�ȡ�һ���Z�������������ǻ����h��ģ�͡�
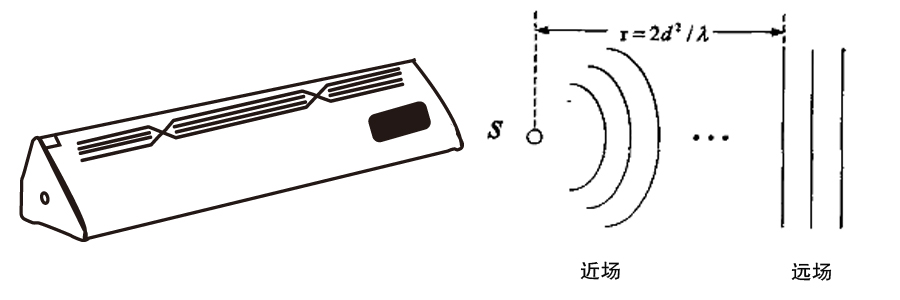
����ģ�ͺ��h��ģ�͵Ą��֛]�н^���Ę˜ʣ�һ���J��Դ�x�����L������ą����c�ľ��x�h������̖���L�r���h������֮���t��������O��������������Ԫ֮�g�ľ��x(�ַQ��п�)��d��Դ����l���Z���IJ��L(��Դ����С���L)���min�����Դ��������ĵľ��x����2d2/��min���t���h��ģ�ͣ���t�����ģ�ͣ����D��ʾ��
�����ؓ�Y��
����������L�ľS�����ɷ֞�һ�S�����S�����S��������L��
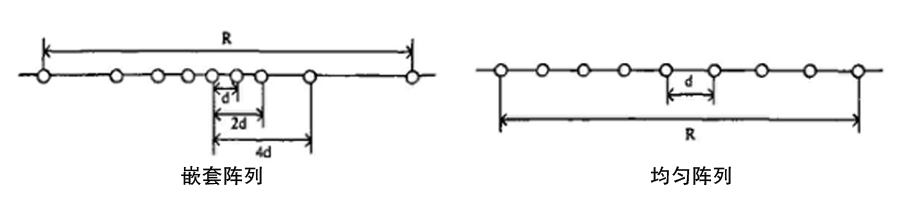
һ�S��������L����������������L�����Ԫ����λ��ͬһ�lֱ���ϡ����������Ԫ�g���Ƿ���ͬ���ֿɷ֞���������(Uniform Linear Array��ULA)��Ƕ������У����D��ʾ���������������ε�����ؓ�Y�������Ԫ֮�g���x��ȡ���λ���`����һֱ��Ƕ������Єt�ɿ��ɎM��������еįB�ӣ���һ�����ķǾ���ꇡ��������ֻ�ܵõ���̖��ˮƽ�������Ϣ��
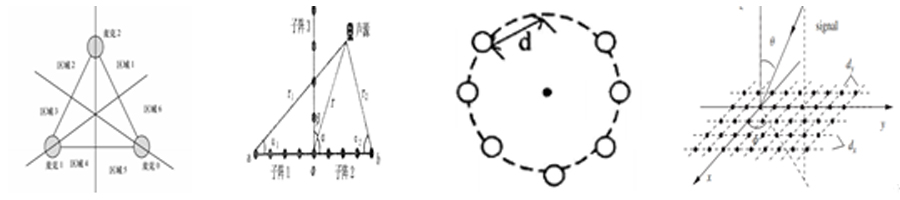
���S��������L����ƽ����������L�����Ԫ���ķֲ���һ��ƽ���ϡ�������еĎ��Π�ɷ֞��߅������ꇡ�T��ꇡ�����Aꇡ�����ꇡ�ͬ�S�Aꇡ��A�λ������ꇵȣ����D��ʾ��ƽ����п��Եõ���̖��ˮƽ��λ�Ǻʹ�ֱ��λ����Ϣ��
ƽ������ؓ�Y��
���S��������L�������w��������L�����Ԫ���ķֲ������w���g�С�������е����w�Π�ɷ֞������wꇡ������wꇡ��L���wꇡ�����ꇵȣ����D��ʾ�����w��п��Եõ���̖��ˮƽ��λ�ǡ���ֱ��λ�Ǻ�Դ�c��������L�����c���x�@���S��Ϣ��

���w����ؓ�Y��
���������γ�
�����γɣ��nj����Ԫ��ݔ���M�Еr�ӻ���λ�a�������ȼә�̎�������γ�ָ���ض�����IJ�����
���h��ģ���У����Oݔ����һ��ƽ�沨���O���������ȣ��r���l��(����)��أ����ڽ��|�еĂ����ٶȞ�c��������һ���ֲ�����Ľ��|�������ƽ�沨�����x����k��k = ��sin��/c = 2sin��/�ˣ����Ц��nj������l�ʦصIJ��L��������̖���_��ͬ�Ă������ĕr�g��ͬ���t��н��յ�����̖�ɱ�ʾ�� f(t)=[f(t-��0) f(t-��1)��f(t-��N-1)]T=[exp(j��(t-k��0)) exp(j��(t-k��1))��exp(j��(t-k��N-1))]T
���Ц�n���n���Ԫ���յ�����̖�����څ����c�ĕr�ӣ�N���Ԫ������T��ʾ�D�á�
���xv(k) = [e-j��k��0 e-j��k��1 ��e-j��k��N-1]T
ʸ��v��������еĿ��g�������Q���������ʸ�����tf(t)�ɱ�ʾ��f(t) = ej��tv(k)��
���̎������һ��ƽ�沨��푑���y(t,k) =HT(��) v(k)ej��t
����H(��)�ǞV����ϵ�������ĸ����~׃�Q����̖y(t,k)���{��ݔ����ݔ�벨��k���Pϵ���r���ϵ����P���w�F��ݔ����һ����ָ������ݔ��ƽ�沨����ͬ���l�ʡ����l����ʽ�ɱ�ʾ��Y(��,k) =HT(��) v(k)��ע���̎�،�����һ��ݔ���l�ʣ�������խ���ġ���еĿՕr̎���Pϵ��ȫ��������ʽ���Ҷ��������Q����е��l��-����푑���������������һ����Ќ��ڕr���l�ʞ�أ�������k��ݔ��ƽ�沨�ď����档
��еIJ�������D��ӳ��ƽ�沨��һ���ֲ�����Ľ��|�Ђ�����r�����������䷽���ʾ���l��-����푑����������Ԍ���B(��:��) = Y(��,k)|k=sin�ȡ�
��еIJ�������D�Ǵ_��������ܵ��P�IҪ�أ�����Ҫ������3dB����������һ���c�ľ��x����һ��߶ȣ���˥�p�ٶȵȡ�����ȵ�ƽ�����x�鹦�ʷ���D���dz��õ�һ�N������ܶ�����
�ġ��r���a��
���������L�Ԫ���gλ�õIJ�����Ԫ���յ�����̖���ڕr�ӣ��ڌ���̖̎��֮ǰ�M�Еr���a�������C���Ԫ��̎�픵����һ���ԣ�ʹ���ָ���������� ���]��εľ����������L��У����D��ʾ��

�O��������L����M���Ԫ�����Ğ酢���c���Ԫ�g����d����̖����Ǟ�ȣ�������ٶȞ�c���t������֪�R����m(0��m��M-1)���Ԫ�ĕr�Ӟ��m = (d/c) sin��(m-(K-1)/2)��
�����L�ɼ����ǔ�����̖���O�ɘ����ڞ�T���t���r���xɢ����̖���f���r�Ӟ�D = ��/T��
ͨ��D����һ�������������xɢ��̖���f�������r�Ӳ������x�����ڷ�����D�����Էֽ���������ֺͷ֔�����D = ⌊D⌋ + d��ʽ�У�⌊D⌋��D������ȡ����0��d<1�����ڷ���ķ֔�����d���˕r��̖���Hֵ���ڃɂ������ɘ��c֮�g�����֔����t���ڌ��H̎���У��Ɍ�d��������ȡ����Ȼ�����⌊D⌋���õ����������r�ӣ����@�N����̎���ĽY�����_��
���˵õ��^�龫�_��̎���Y�����ͱ���OӋ�֔��r�ӞV���������ɘ���̖�M�о��_�ĕr���a��������ķ֔��r�ӞV�����ě_��푑��ɱ�ʾ��hid(m) = sinc(m-D)��
�ɔ�����̖̎��֪�R��֪����ʽ�ǟo���L��������������ģ��������ϲ��Ɍ��F�����˽�Q�@һ���}���ڌ��H�����У�ͨ��������ʽ�M�мӴ����Ӵ���V�����ě_��푑���h(m)=(W(m-D)sinc(m-D), 0��m��M-1���Ӵ���ķ֔��r�ӞV�����ĕr�Ӿ��_�̶��c����֔��r�ӞV�����dz��ӽ���










